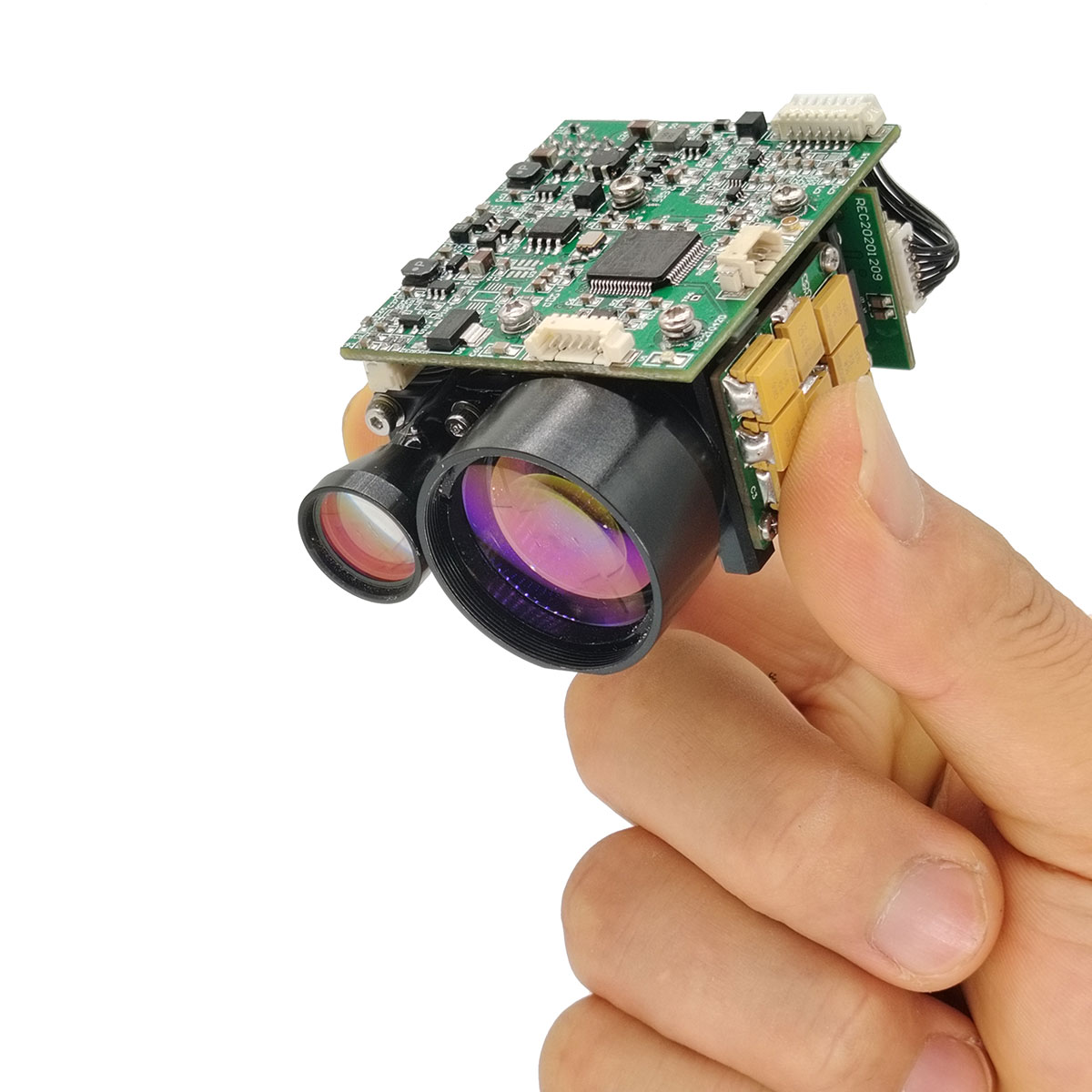
● Som den professionella tillverkaren vill vi ge dig 20 km ögonsäkerhetslaseravståndsmätare. STA-C2030X laseravståndsmätarmodul antar egenutvecklad 1535nm erbiumglaslaserkomponent, som har funktionerna lång räckvidd, låg strömförbrukning, liten storlek och säkerhet för mänskliga ögon.
● Räckviddsprestanda: 20 000 m (NATO-mål), 30 000 m (maximal räckvidd)
● Avståndsnoggrannhet ± 1m
● Mätnoggrannhet ≥ 98 %
● Vikt ≤ 380g
STA-C2030X 20 km Ögonsäkerhet Laser Avståndsmätare Modul har en säker design, lätt konstruktion, minskad strömförbrukning, förlängd livslängd och ett brett temperaturområde. Den här laseravståndsmätarmodulen är flitigt använd i uppgifter som spaning, mätning och kartläggning. Den saknar ett skal, men erbjuder en mängd olika gränssnitt för enkel integration i olika system. Användare drar nytta av bekvämligheten med PC-programvara och kommunikationsprotokoll, vilket förbättrar användbarheten för handhållna enheter och multifunktionssystem.
Engångsavstånd och kontinuerlig avstånd
3-målsdetektering, främre och bakre målindikering
Innehåller självkontrollfunktion
Wake-on-lan funktion
Antal emitterade pulser under MNBF ≥1×106 gånger
Handhållna enheter
Obemannad luftfarkost
Elektro-optisk pod
Gränsbevakning
| Projekt | Prestandaindikatorer | |
| Modell | STA-C2030X | |
| Laser våglängd | 1535±5nm | |
| Ögonsäkerhet | Klass Ⅰ (IEC 60825-1) | |
| Divergensvinkel | ≤0,3 mrad | |
| Mottagande synfält (FOV) | ~ 1,8 mrad | |
| Starta Lens Diameter | Φ18 mm | |
| Mottagarens linsdiameter | Φ60 mm | |
| Mätområde (reflektans 30 %; sikt ≥28 km) | MAX räckvidd | ≥30 000 m |
| Stort mål | ≥23000 m | |
| Natos mål | ≥20 000 m | |
| Människor (0,5 m×1,7 m) | ≥11 000 m | |
| UAV(0,2x0,3m) | ≥4000 m | |
| Minsta räckvidd | 50 m | |
| Varierande frekvens | 0,5~10Hz | |
| Varierande noggrannhet | ±1 m | |
| Räckviddsupplösning | ≤30 m | |
| Precisionshastighet | ≥98 % | |
| Falskt larmfrekvens | ≤1 % | |
| Antal upptäckter med flera mål | Upp till 3 mål | |
| Elektriskt gränssnitt | molex- 532610771 | |
| Matningsspänning | DC12 V | |
| Standby strömförbrukning | ≤1,2W | |
| Genomsnittlig strömförbrukning | ≤2 W | |
| Högsta energiförbrukning | ≤3W | |
| Vikt | ≤380g | |
| Mått (L×B×H) | 125mm×100mm×70mm | |
| Driftstemperatur | -40~+70 ℃ | |
| Förvaringstemperatur | -55~+75 ℃ | |
| Slagtålighet | 1200 g/1 ms(GJB150. 16A-2009) | |
| Antivibration | 5–50–5 Hz ,1 oktavområde/min ,2,5 g | |
| Spännande logik | Första och sista målet, multi-target avstånd, distansselektivitet | |
| Aktiveringstid | ≤950 ms | |
| Datagränssnitt | RS422 | |
| Elektrisk isolering | Isolering av kraftjord, kommunikationsjord och strukturjord | |
| Pålitlighet | MTBF ≥ 1500h | |
| Optisk axelstabilitet | ≤0,05 mrad | |
| Icke-parallellism mellan optisk axel och monteringsyta | ≤0,5 mrad | |
| Skyddsklass | IP67 | |
| ESD-klass | (Linsposition) Kontaktutsläpp 6kV Luftutsläpp 8kV |
|
| Elektromagnetisk kompatibilitet (EMC) | CE/FCC-certifiering | |
| Miljövänlig | RoHS2.0 | |

Elektrisk kontakt modell: J30J; Motsvarande kontakter och kablar ska tillhandahållas av part B. Den detaljerade definitionen av elektriska gränssnitt visas i följande tabell:
Tabell 1 Gränssnittsdefinition
| Stift | Definition |
| 1 | GND |
| 2 | GND |
| 3 | GND |
| 4 | VCC 12V |
| 5 | VCC 12V |
| 6 | RS422 RX+ |
| 7 | RS422 RX- |
| 8 | RS422 TX- |
| 9 | RS422 TX+ |
Dataöverföringen mellan avståndsmätaren och den övre datorn inkluderar följande:
Kontrollkommandon: inklusive startavståndsmätning, kontinuerlig avståndsmätning, enkeldistansmätning, frågekommandon, etc.
Returdata: inklusive avståndsinformation, omgivningstemperatur, avståndsmätarestatus etc. Datautbytet mellan avståndsmätaren och den övre datorn använder 422-bussen. Det specifika kommunikationsprotokollet för programvaran är som följer:
Kommunikationsformat: RS422-kommunikation, baudhastighet 115200bps;
Dataformat: 8-bitars data, en startbit, en stoppbit, utan paritetskontroll. Datan består av en rubrikbyte, kommandodel, datalängd, parameterdel och kontrollsummabyte;.
Kommunikationsmetod: Master-kontrollen och avståndsmätaren använder en master-slave-kommunikationsmetod. Huvudkontrollen skickar kontrollkommandon till avståndsmätaren, och avståndsmätaren tar emot och utför kommandona. I avståndsläget skickar avståndsmätaren tillbaka data och status för avståndsmätaren till den övre datorn enligt avståndscykeln. Kommunikationsformatet och kommandoinnehållet visas i tabellen nedan.
Master sändning
Formatet på det skickade meddelandet är som följer:
| STX0 | CMD | LEN | DATA1H | DATA1L | CHK |
Skicka meddelandeformatbeskrivning
Tabell 2 Beskrivning av sändande meddelandeformat
| Inga. | Namn | illustrera | Koda | Anmärkning |
| 1 | STX0 | Meddelande startflagga | 55(H) | |
| 2 | CMD | Kommandoord | Se tabell 3 | |
| 3 | LEN | Datalängd | Antalet alla bytes utom startflaggan, kommandoordet och kontrollsumman | |
| 4 | DATAH | parameter | ||
| 5 | ankomst | |||
| 6 | CHK | XOR-kontroll | Förutom valideringsbyten är andra byte XORed |
Kommandot beskrivs på följande sätt:
Tabell 3 Beskrivning av kommandon och dataord som sänts av huvudkontrollen till avståndsmätaren
| Inga. | Kommandoord | Funktioner | Databyte | Anmärkningar | Längd | exempelkod (dator) |
| 1 | 0x00 | Standby (kontinuerligt avståndsstopp) |
DATAH=00(H) DATAL=00(H) | Avstånd mätning maskinen slutar fungera |
6 byte | 55 00 02 00 00 57 |
| 2 | 0x01 | Enkel rangering | DATAH=00(H) DATAL=00(H) | 6 byte | 55 01 02 00 00 56 | |
| 3 | 0x02 | Kontinuerlig rangering | DATAH=XX(H) DATAH=YY(H) | DATA uttrycker intervallperioden i ms. |
6 byte | 55 02 02 03 E8 BE (1Hz-intervall) |
| 4 | 0x03 | Självtest | DATAH=00(H) DATAL=00(H) | 6 byte | 55 03 02 00 00 54 | |
| 5 | 0x04 | Avståndsval och närmaste avståndsinställning |
DATAH=XX(H) DATAH=YY(H) | DATA uttrycker den blinda zonen värde, enhet 1m |
6 byte | 55 04 02 00 64 37 (100m närmast) |
| 6 | 0x06 | Kumulativ antal ljus ut fråga |
DATAH=00(H) DATAL=00(H) | Kumulativ antal ljus ut fråga |
6 byte | 55 06 02 00 00 51 |
| 7 | 0x11 | APD-ström på | DATAH=00(H) DATAL=00(H) | 6 byte | 55 11 02 00 00 46 | |
| 8 | 0x12 | APD-ström av | DATAH=00(H) DATAL=00(H) | 6 byte | 55 12 02 00 00 45 | |
| 9 | 0xEB | Nummerfråga | DATAH=00(H) DATAL=00(H) | 6 byte | 55 EB 02 00 00 f.Kr |
l Mastermottagningsformat
Formatet för mottagningsmeddelandet är som följer:
| STX0 | CMD | LEN | DATA | DATUM0 | CHK |
Tabell 4 Beskrivning av format för mottagningsmeddelande
| Inga. | Namn | Beskrivning | Koda | Anmärkningar |
| 1 | STX0 | Meddelande startflagga 1 | 55(H) | |
| 2 | CMD_JG | Datakommandoord | Se Tabell 5 | |
| 3 | LEN | Datalängd | Antalet alla bytes utom startflagga, kommandoord och kontrollsumma | |
| 4 | Dn | Parameter | Se Tabell 5 | |
| 5 | D0 | |||
| 6 | CHK | Kontrollsumma | Alla byte utom paritetsbyte |
Master motta statusbeskrivning:
Tabell 5 Beskrivning av dataordet som sänts från körefindern till huvudkontrollen
| Inga. | kommandoord | Funktioner | Databyte | Anmärkningar | Total längd | ||
| 1 | 0x00 | Standby (kontinuerligt avståndsstopp) | D1=00(H) D0=00(H) | 6 byte | |||
| 2 | 0x03 | Självtest | D7 ~D0 | D0: koltyp, anger APD-temperatur i grader Celsius; D1: APD högspänningsvärde, enhet V; D3-D2: persiennvärde, enhet 1m D5-D4: -5V spänning, enhet 0,01V. D7-D6:+5V spänning, enhet 0,01V |
12 byte | ||
| 3 | 0x04 | Inställning av närmaste avstånd till opt-in, enhet m | D1 D0 | DATA uttrycker det närmaste avståndsvärdet i 1m; Först hög sedan låg |
6 byte | ||
| 4 | 0x06 | Kumulativt antal förfrågan om ljus ut | D3~D0 | DATA uttrycker antalet gånger ljuset sänds ut, 4 byte, den höga byten kommer först | 8 byte | ||
| 5 | 0x11 | APD-ström på | DATAH=00(H) DATAL=00(H) | APD med hög spänning | 6 byte | ||
| 6 | 0x12 | APD-ström av | DATAH=00(H) DATAL=00(H) | APD utan högspänning | 6 byte | ||
| 7 | 0xED | Work timeout | 0x00 0x00 | Lasern är i laserskydd och kan inte mäta avståndet. | 6 byte | ||
| 8 | 0xEE | Valideringsfel | 0x00 0x00 | 6 byte | |||
| 9 | 0XEF | Timeout för seriell kommunikation | 0x00 0x00 | 6 byte | |||
| 10 | 0x01 | Enkel avståndsmätning | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 första målavstånd (enhet 0,1 m) D5-D3 andra målavstånd (data är 0 vid enstaka mål) (enhet 0,1 m) D2-D0 tredje målavstånd (data är 0 vid enstaka mål) (enhet 0,1 m) 3 mål från nära till långt D9 (bit7-bit0) flaggbyte: D9 bit 7 indikerar huvudvåg; 1: med huvudvåg, 0: utan huvudvåg. D9 bit 6 indikerar returvåg; 1: med returvåg, 0: utan returvåg D9 bit 5 indikerar laserstatus; 1: laser normal, 0: laserfel D9 bit 4 timeout alarm; 1 normal, 0 timeout D9 bit 3 ogiltig, = 1 D9 bit 2 indikerar APD-status; 1: normal, 0: fel D9 bit 1 indikerar om det finns en tidigare mål; 1: mål, 0: inget mål (målet före huvudmålet är det tidigare målet) D9 bit 0 indikerar om det finns en efter- mål; 1: med mål, 0: utan mål (den målet efter huvudmålet är eftermålet) |
14 byte | ||
| 11 | 0x02 | Kontinuerlig avståndsmätning | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 första målavstånd (enhet 0,1 m) D5-D3 andra målavstånd (data är 0 vid enstaka mål) (enhet 0,1 m) D2-D0 tredje målavstånd (data är 0 vid enstaka mål) (enhet 0,1 m) 3 mål från nära till långt D9 (bit7-bit0) flaggbyte: D9 bit 7 indikerar huvudvåg; 1: med huvudvåg, 0: utan huvudvåg. D9 bit 6 indikerar returvåg; 1: med returvåg, 0: utan returvåg D9 bit 5 indikerar laserstatus; 1: laser normal, 0: laserfel D9 bit 4 timeout alarm; 1 normal, 0 timeout D9 bit 3 ogiltig, = 1 D9 bit 2 indikerar APD-status; 1: normal, 0: fel D9 bit 1 indikerar om det finns en tidigare mål; 1: mål, 0: inget mål (målet före huvudmålet är det tidigare målet) D9 bit 0 indikerar om det finns en efter- mål; 1: med mål, 0: utan mål (den målet efter huvudmålet är eftermålet) |
14 byte | ||
| 14 | 0xEB | Nummersökning | D16 … … D0 | D15 D12 Komplett modell D11 D10 Produktnummer D9 D6 Programvaruversion D5 D4 APD-nummer D3 D2 Lasernummer D1 D0 FPGA-version |
20 byte | ||
| Anmärkningar: ① Odefinierad databyte/bit, standard är 0; | |||||||
För mer information om våra produkter, vänligen kontakta Jioptik.