STA-B50X är en ögonsäker laseravståndsmätningsmodul som kan detektera målavståndet och överföra det uppmätta avståndet till den övre datorn via seriell kommunikation. Sikt ≥ 12 km, målreflektivitet ≥ 0,3, luftfuktighet ≤ 80 %, fordonets (2,3 m × 2,3 m NATO-mål) avståndsavstånd ≥ 5 km.
(1) Enkelt och kontinuerligt avstånd;
(2) Svarar på laseravståndskommandon och kan när som helst sluta mäta avståndet enligt stoppkommandot;
(3) Mata ut avståndsdata och statusinformation en gång per puls under avståndsmätning;
(4) Den kan rapportera det kumulativa antalet sända laserpulser (ingen förlust av strömavbrott);
(5) Avståndsval, främre och bakre målindikering;
(6) Självtestfunktion.
| Punkt | Teknisk parameter | Instruktion |
| Modell | STA-B50X | |
| Arbetsvåglängd | 1535±5nm | |
| Ögonsäkerhet | Klass 1 (IEC 60825-1) | |
| Mottagningsöppning | Φ25 mm | |
| Emissionsöppning | Φ10 mm | |
| Rangeringsförmåga | 30-8000m | |
| Spännvidd | ≥10000m | MAX räckvidd, reflektivitet: 0,9, observatörssikt 25 km |
| ≥7000m | Stora byggnadsmål, reflektivitet: 0,6, observatörssikt 20 km | |
| ≥5000m | Natos mål | |
| ≥3000m | Mänskligt mål | |
| ≥1500m | UAV mål | |
| Mini Range | 30 m | |
| Detektering av flera mål | Upp till 3 mål | |
| Räckviddsupplösning | 30 m | |
| Varierande noggrannhet | ±1m | |
| Avståndsfrekvens | 1~10Hz justerbar | |
| Noggrannhetsgrad | ≥98 % | |
| Falskt larmfrekvens | 1 % | |
| Divergensvinkel | ≤0,5 mrad | |
| Kommunikationsgränssnitt | RS422 | TTL/RS232-gränssnittet kan anpassas |
| Spänning | DC9~32V | |
| Energiförbrukning | ≤1,2W(@1hz) | Arbetskraft |
| ≤5W@12V | Toppeffekt | |
| 0,1 W | Standby-ström (Anslut POWER-ON) | |
| Laser optisk axelstabilitet | ≤0,05 mrad | |
| Parallellt fel | ≤0,3 mrad | Parallellismfel för optisk axel till monteringsreferens |
| Mekanisk chock | 75 g, 1 ms | |
| Arbetstemperatur | -40℃~+70℃ | |
| Förvaringstemperatur | -55℃~+75℃ | |
| Pålitlighet | MTBF ≥ 1500h | |
| Storlek | ≤50x32x43,5 mm | |
| Vikt | ≤75g | |
| Huvudfunktion | Första och sista målavståndet, Multi-target range, Avståndsselektivitet |
|
Anmärkningar:
1) NATO-målstorlek 2,3 m × 2,3 m; Mänsklig målstorlek 0,5 m × 1,7 m; UAV-målstorlek 0,2 m × 0,3 m; Reflekteringsförmåga 30 %, luftfuktighet ≤ 80 %, observatörssikt ≥ 12 km

| stift | definition | förklara |
| 1 | GND | Sträng |
| 2 | Makt är | Strömförsörjning, från 3 till 5 V |
| 3 | UART_NC | (tömma) |
| 4 | UART_TX | Seriell portsändare, TTL_3.3V nivå |
| 5 | UART_RX | Serieportmottagningsände, med en TTL_3.3V-nivå |
| 6 | POWER_ON | Modulströmbrytare, TTL_3.3V nivå; (> 0,7V på, <0,15V av som standard) |
| Stift | Definition | Fungera | Anteckningar |
| 1 | RX+ | RS422-mottagare + | Blå |
| 2 | RX- | RS422-mottagare - | Grön |
| 3 | TX- | RS422 transmission - | Purpur |
| 4 | TX+ | RS422 Transmission + | Gul |
| 5 | GND | Kommunikationsjordkabel | Vit |
| 6 | VEE | Strömförsörjning + | Röd |
| 7 | GND | Strömförsörjning - | Svart |
| 8 | PWR EN | / | Aska |
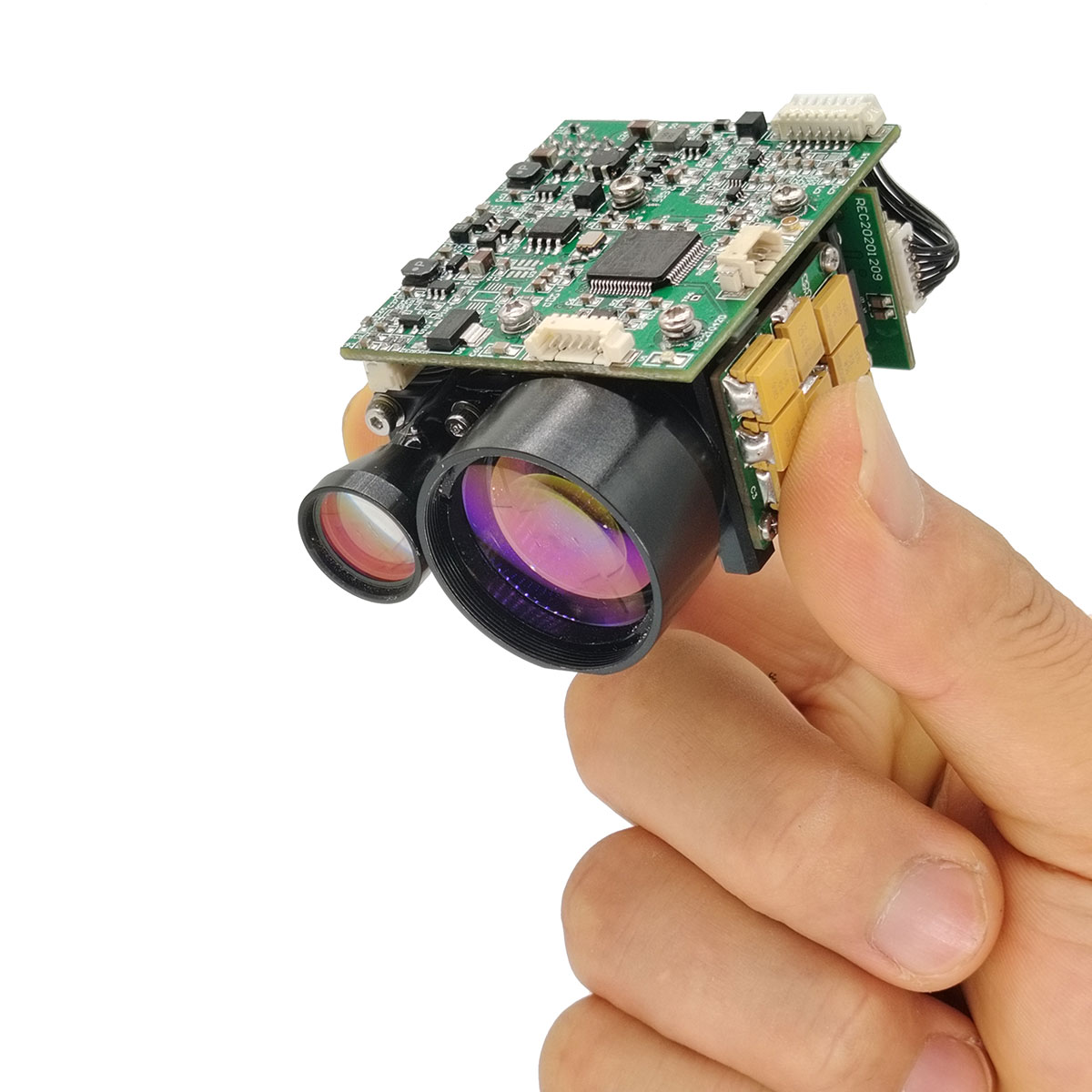
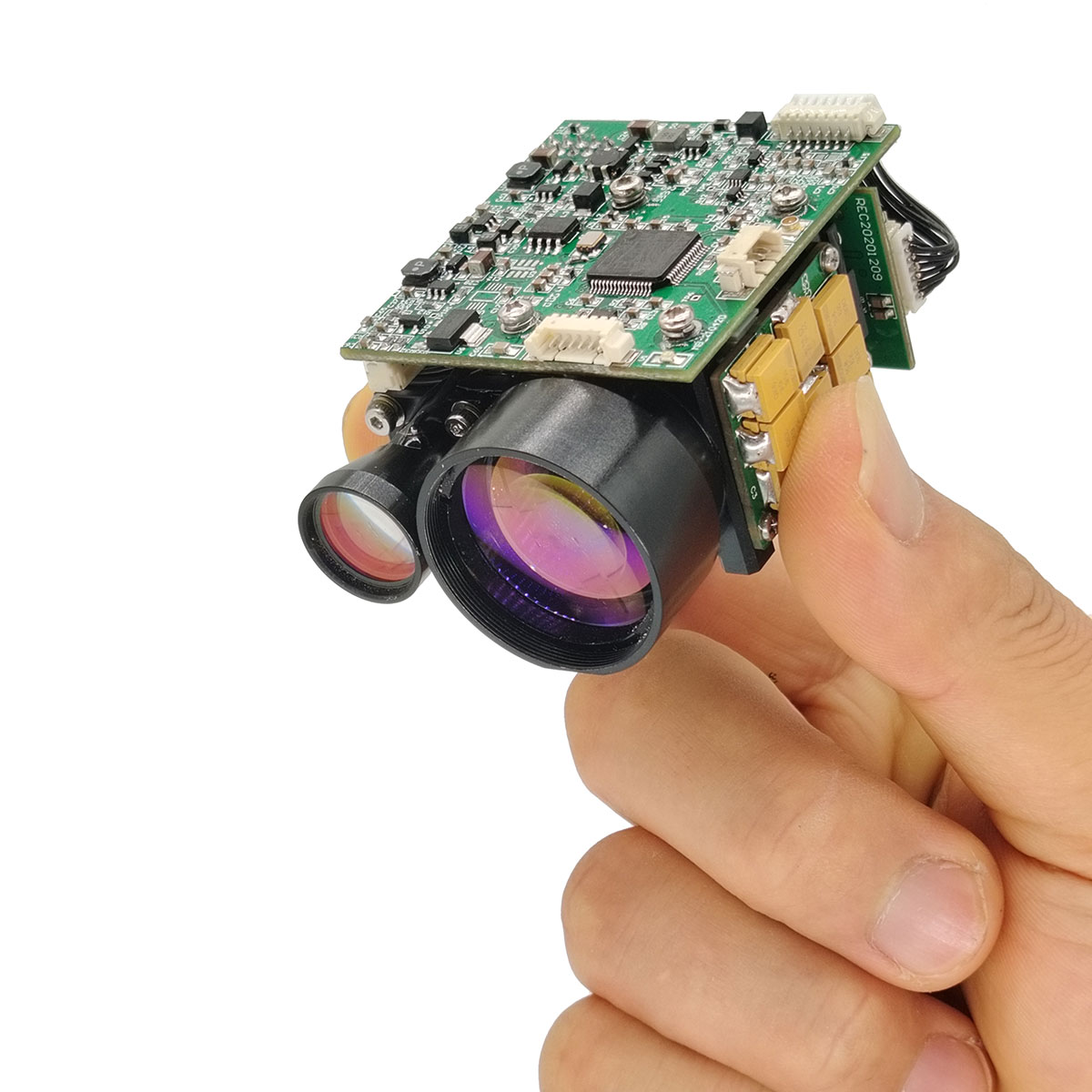
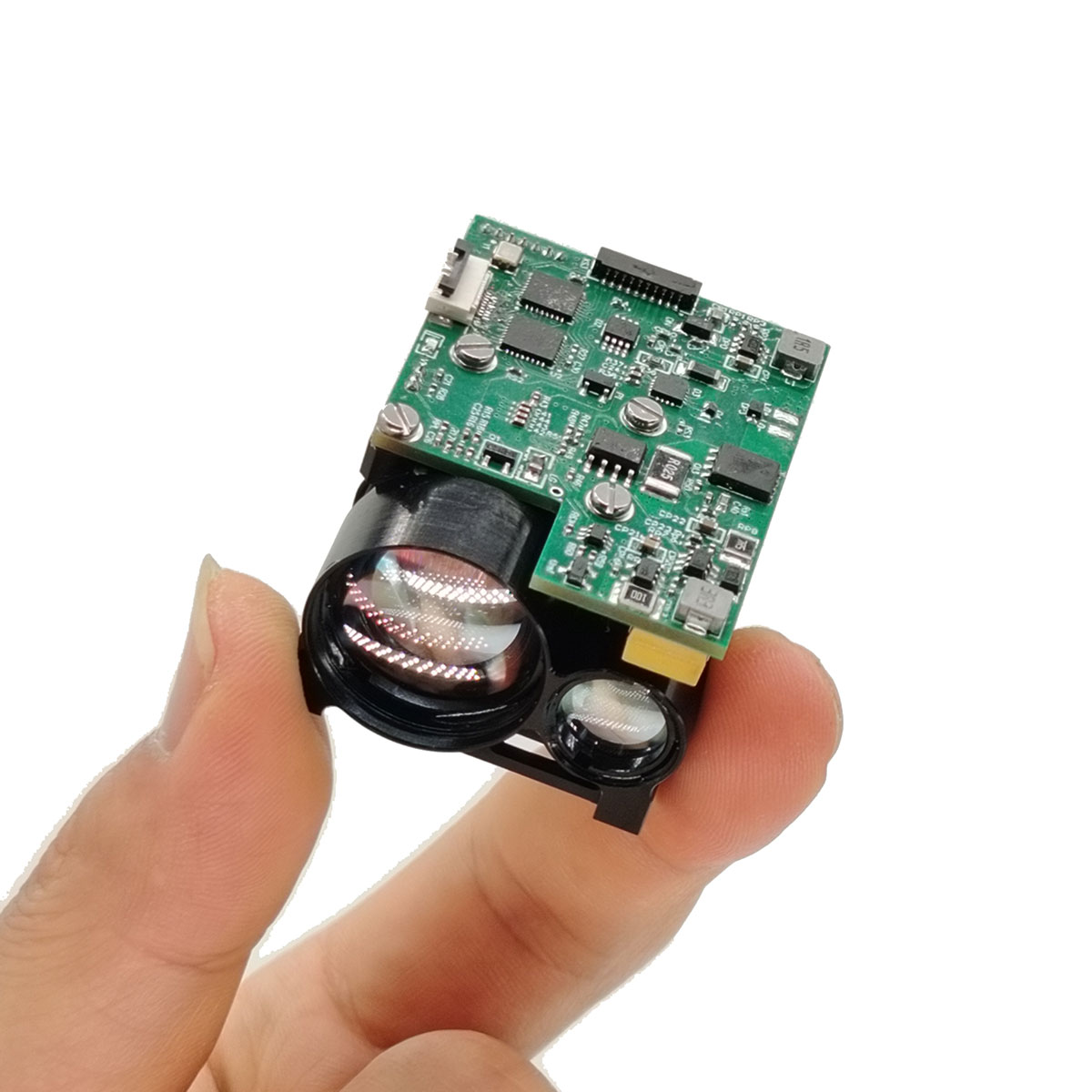
OEM/ODM-moduler och skräddarsydda lösningar
B50X är designad för systemintegratörer som letar efter en bekväm, kraftfull och kompakt laseravståndslösning. Det ger pålitlig prestanda i ett brett spektrum av applikationer.
Den är mycket liten, ultralätt, har låg strömförbrukning och kan mätas över långa avstånd. Den är lämplig för handhållna enheter (värmebilder), vapenmonteringsapplikationer, bärbara system och lättviktssensorsviter och obemannade flygfarkoster eller UGV.
1. Överföringsprotokoll: asynkron seriell kommunikation;
2. Porthastighet: 115200;
3. Databitar: 10bitar: en startbit, 8 databitar, en stoppbit, ogiltig verifiering;
4. Datastruktur: Datan består av rubrikbyte, kommandodel, datalängd, parameterdel och kontrollbyte;
5. Kommunikationsläge: huvudkontrollen skickar kontrollkommandon till avståndsmaskinen, och avståndsmaskinen tar emot och utför instruktionerna. I avståndstillståndet skickar avståndsmaskinen data och status för avståndsmaskinen tillbaka till den övre datorn enligt avståndscykeln. Kommunikationsformatet och kommandoinnehållet visas i följande tabell.
A) Huvudkontroll sänder
Formatet på meddelandet som ska skickas är som följer:
| STX0 | CMD | LEN | DATA1H | DATA1L | CHK |
Tabell 2 Formatbeskrivning av det skickade meddelandet
| ordernummer | namn | förklara | koda | anmärkningar |
| 1 | STX0 | Meddelande startflagga | A5(H) | |
| 2 | CMD | CW | Se tabell 3 | |
| 3 | LEN | DL | Antalet alla bytes utom startmärket, kommandoordet och kontrollsumman | |
| 4 | DATAH | parameter | Se tabell 3 | |
| 5 | DATAL | |||
| 6 | CHK | XOR-verifiering | Förutom den giltiga byten är alla andra byte XORed |
Kommandot beskrivs på följande sätt:
Tabell 3 Beskrivning av kommandon och dataord som skickats av befälhavaren till avståndsmaskinen
| ordernummer | CW | fungera | databyte | anmärkningar | längd | Exempelkod |
| 1 | 0x00 | upphöra | DATAH=00(H) DATAL=00(H) |
Avståndsmätaren slutar mäta | Sex byte | A5 00 02 00 00 A7 |
| 2 | 0x01 | Enkel rangering | DATAH=00(H) DATAL=00(H) |
Sex byte | A5 01 02 00 00 A6 | |
| 3 | 0x02 | Kontinuerlig rangering | DATAH=XX(H) DATAL=ÅÅ(H) |
DATA beskriver avståndsperioden, i ms | Sex byte | A5 02 02 03 E8 4E (1Hz-intervall) |
| 4 | 0x03 | självkontroll | DATAH=00(H) DATAL=00(H) |
Sex byte | A5 03 02 00 00 A4 | |
| 5 | 0x04 | Ställ in det närmaste avståndet till urvalet | DATAH=XX(H) DATAL=ÅÅ(H) |
DATA beskriver blindzonens värde, enhet 1m | Sex byte | A5 04 02 00 64 C7 (100m är närmaste avstånd) |
| 6 | 0x06 | Kumulativt antal frågor om ljuseffekt | DATAH=00(H) DATAL=00(H) |
Kumulativt antal frågor om ljuseffekt | Sex byte | A5 06 02 00 00 A1 |
| 7 | 0x11 | APD-strömmen är på | DATAH=00(H) DATAL=00(H) |
Sex byte | A5 11 02 00 00 B6 | |
| 8 | 0x12 | APD-strömmen är avstängd | DATAH=00(H) DATAL=00(H) |
Sex byte | A5 12 02 00 00 B5 | |
| 9 | 0xEB | Nummerfråga | DATAH=00(H) DATAL=00(H) |
Nummerfråga | Sex byte | A5 EB 02 00 00 4C |
a) Huvudkontrollen tar emot format
Formatet på det mottagna meddelandet är som följer:
| STX0 | CMD | LEN | DATAn | DATA0 | CHK |
Tabell 4 Formatbeskrivning av mottagna meddelanden
| ordernummer | namn | förklara | koda | anmärkningar |
| 1 | STX0 | Meddelande startflagga 1 | A5 (H) | |
| 2 | CMD_JG | Datakommandoord | Se tabell 5 | |
| 3 | LEN | DL | Antalet alla bytes utom startmärket, kommandoordet och kontrollsumman | |
| 4 | Dn | parameter | Se tabell 5 | |
| 5 | D0 | |||
| 6 | CHK | XOR-verifiering | Förutom den giltiga byten är alla andra byte XORed |
Huvudkontrollmottagningsstatusbeskrivning:
Tabell 5 beskriver dataordet som sänds av avståndsmätaren till huvudstyrenheten
| ordernummer | CW | fungera | databyte | anmärkningar | total längd |
| 1 | 0x00 | upphöra | D1=00(H) D0=00(H) |
Sex byte | |
| 2 | 0x03 | självkontroll | D8 ~D1 | D8-D7: -5V spänning, enhet 0,01V. D6-D5: Döda vinklar värde, enhet 1m D4: APD högspänningsvärde, enhet V; D3: koltyp, anger APD-temperatur, enhet: grader Celsius; D2-D1: +5V spänning, enhet 0,01V |
12 byte |
| 3 | 0x04 | Avstånd till närmaste åtkomstinställning, enhet m | D1 D0 | DATA beskriver närmaste avståndsvärde, enhet 1m; Börja högt och slut lågt |
Sex byte |
| 4 | 0x06 | Kumulativt antal frågor om ljuseffekt | D3~D0 | DATA uttrycker antalet ljus, 4 byte, med den höga byten först | Sju byte |
| 5 | 0x11 | APD-strömmen är på | D1=00(H) D0=00(H) |
APD-strömmen är på | Sex byte |
| 6 | 0x12 | APD-ström av | D1=00(H) D0=00(H) |
APD-strömmen är avstängd | Sex byte |
| 7 | 0xED | Jobbar övertid | 0x00 0x00 | Lasern är under laserskydd och kan inte mätas. | Sex byte |
| 8 | 0xEE | Effektivitetsfel | 0x00 0x00 | Sex byte | |
| 9 | 0XEF | Tidsgräns för serieportkommunikation | 0x00 0x00 | Sex byte | |
| 10 | 0x01 | Enstaka avståndsmätning (enkelt mål, noll för det andra och tredje målet, noll för det tredje målet i början och slutet av målet) | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 första målavstånd (enhet 0,1 m) D5-D3 avstånd till det andra målet (enhet: 0,1 m) D2-D0 tredje målavstånd (enhet 0,1 m) 3. Mål är från nära till långt D9 (bit7-bit0) flaggbyte: D9 är den 7:e positionen som indikerar huvudvågen; 1: det finns en huvudvåg, 0: ingen huvudvåg. D9 är den sjätte positionen som indikerar eko; 1: det finns eko, 0: inget eko D9 Den femte positionen indikerar laserstatus; 1: normal laser, 0: laserfel D9 är den fjärde biten i timeoutflaggan, 1: normal, 0: timeout D9 är ogiltig vid 3:e positionen (inställd på 1); D9 Den andra positionen indikerar APD-status; 1: normal, 0: fel D9 är den första positionen som indikerar om det finns ett tidigare mål; 1: det finns ett tidigare mål, 0: inget tidigare mål (mål i det blinda området). D9 Den 0:e biten indikerar om det finns ett efterföljande mål; 1: det finns ett efterföljande mål, 0: inget efterföljande mål (målet efter huvudmålet är det efterföljande målet) |
14 byte |
| 11 | 0x02 | Kontinuerlig avståndstagning (enkelt mål, noll för det andra och tredje målet, noll för det tredje målet i början och slutet av målet) | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 första målavstånd (enhet 0,1 m) D5-D3 avstånd till det andra målet (enhet: 0,1 m) D2-D0 tredje målavstånd (enhet 0,1 m) 3. Mål är från nära till långt D9 (bit7-bit0) flaggbyte: D9 är den 7:e biten som indikerar huvudvågen; 1: det finns en huvudvåg, 0: ingen huvudvåg. D9 är den sjätte positionen som indikerar eko; 1: det finns eko, 0: inget eko D9 Den femte positionen indikerar laserstatus; 1: normal laser, 0: laserfel D9 är den fjärde biten i timeoutflaggan, 1: normal, 0: timeout D9 är ogiltig vid 3:e positionen (inställd på 1); D9 Den andra positionen indikerar APD-tillståndet; 1: normal, 0: fel D9 är den första positionen som indikerar om det finns ett tidigare mål; 1: det finns ett tidigare mål, 0: inget tidigare mål (mål i det blinda området). D9 Den 0:e biten indikerar om det finns ett efterföljande mål; 1: det finns ett efterföljande mål, 0: inget efterföljande mål (målet efter huvudmålet är det efterföljande målet) |
14 byte |
| 12 | 0xEB | Nummerfråga | D17…… D0 | D17 D16 D15 D14 D13 D12 Hel maskin modellkod D11D10 Produktnummer D9 D6 mjukvaruversion D5 D4 APD-nummer D3 D2 Lasernummer Version D1 av FPGA |
22 byte |
| Obs: ① Odefinierad databyte/bit, standard är 0; | |||||
För mer information om våra produkter, vänligen kontakta Jioptik.